Normal Matrix 矩阵推导
Normal Matrix 是用来将法线从 Model Space 转换到 World Spaces 的。
相对于将顶点位置从 Model Space 转换到 View Space,法线的转换有两点需要额外考虑:
- 法线是不需要考虑平移的
- 如果物体存在非等比例的缩放,而对法线直接进行这样的非等比例的缩放后,发现将不再垂直于平面,如下图所示:
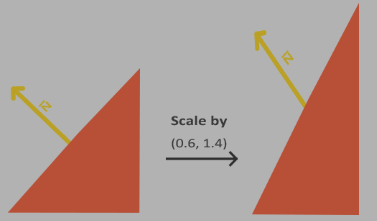
因此 Normal Matrix 相较于普通的 Mode Matrix,需要对上述的情况做处理。
#排除平移
法线是一个方向,不需要考虑平移,因此 Model Matrix 中的平移部分是不需要的,只需要取 Model Matrix 的左上 子矩阵即可。
即针对于法线,假设仍然使用 Model Matrix 来变换,那么表达式应该为:
1 | normalOutput = normalize(mat3(model) * normalInput); |
但这仅仅解决了平移的问题,对于非等比例缩放的问题,还需要进一步处理。
#处理非等比例缩放
#为何普通边可以使用 Model 矩阵
为了说明为何法线在使用 Model 矩阵转换后,遇到非等比例缩放下会出现问题,首先我们需要论证为何普通的边使用 Model 矩阵转换,在经过了非等比例缩放后,不会出现问题。
我们假设三角形的一条边上有 和 两个点,那么这条边可以表达为:
此时对这条边进行 Model Matrix 的变换,可以得到:
由于 和 是三角形在转换后的两个顶点,因此 仍然是转换后的三角形的边。
#为何法线不能使用 Model 矩阵
对于法线,我们可以同样用上述的方式计算,我们用 和 两个点来表示三角形的法线,假设 是三角形上的一个点, 是三角形外的一个点,但两者的连线垂直于三角形的边:
在经过了 Model Matrix 的变换后,我们得到:
此时,我们只能保证 是三角形上的一个点,但 和 之间的连线,即 并不能确定是垂直于三角形的边的。
如果要确保 仍然垂直于三角形的边,那么必须满足 。我们前面已经知道了 是通过 经由 矩阵变换得到,而满足条件的 不一定可以通过矩阵 变换获得。我们这里假设满足条件的 可以通过矩阵 变换得到,即:
我们要求的就是矩阵 该如何表达。
上述公式的 和 都是向量,表达式求的是两个向量的点积。为了方便后续的计算,我们首先需要将 和 间的计算转换为矩阵的乘法。假设 和 都是行向量,那么 和 也是行向量,为了让 和 可以用矩阵乘法表示,需要首先将 转换为列向量,这需要对 进行转置,即:
同理对于向量计算 也可以转换为矩阵运算
上述式子可以进一步化简为:
将上述的计算连起来,即我们需要求 , 满足:
假设 ,那 就变为了 , 显然是等于 0 的,即满足了我们的要求。
即为变化前的三角形的法线的矩阵表示,T 即为变换前的三角形的边,他们相乘显然为 0。
此时问题就变成了求 ,而 满足 :
至此我们求得了 ,即对于法线,我们需要使用 来变换。
所以一个正确的法线变换的表达式为:
1 | normalOutput = normalize(mat3(transpose(inverse(model))) * normalInput); |
#Reference
 wechat
wechat alipay
alipay